




Introduction
In physics, the concept of a reference frame is fundamental to describing motion. A reference frame provides a coordinate system and a set of observers used to measure positions, velocities, and accelerations of objects. Depending on the motion of the observer, reference frames can be classified into inertial reference frames and non-inertial reference frames.
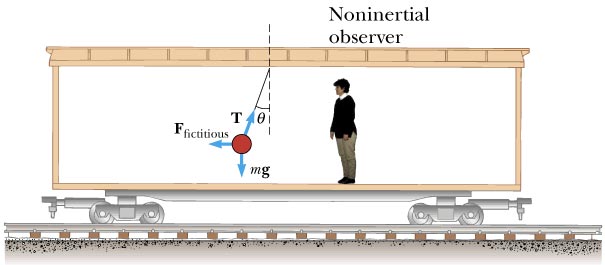
A non-inertial reference frame is a frame of reference that is accelerating or rotating relative to an inertial frame. In such frames, Newton’s laws of motion do not appear to hold unless additional forces, known as fictitious forces or pseudo-forces, are introduced.
Non-inertial frames are very common in everyday life. For example:
- A car accelerating or braking
- An elevator moving upward or downward
- A rotating merry-go-round
- The Earth itself, which is rotating and revolving around the Sun
In all these cases, observers within these frames experience apparent forces that arise due to acceleration of the reference frame itself.
Understanding non-inertial frames is essential in many fields of physics and engineering, including:
- Classical mechanics
- Astrophysics
- Atmospheric science
- Aerospace engineering
- Navigation systems
This concept also plays a role in advanced theories such as general relativity.
Reference Frames in Mechanics
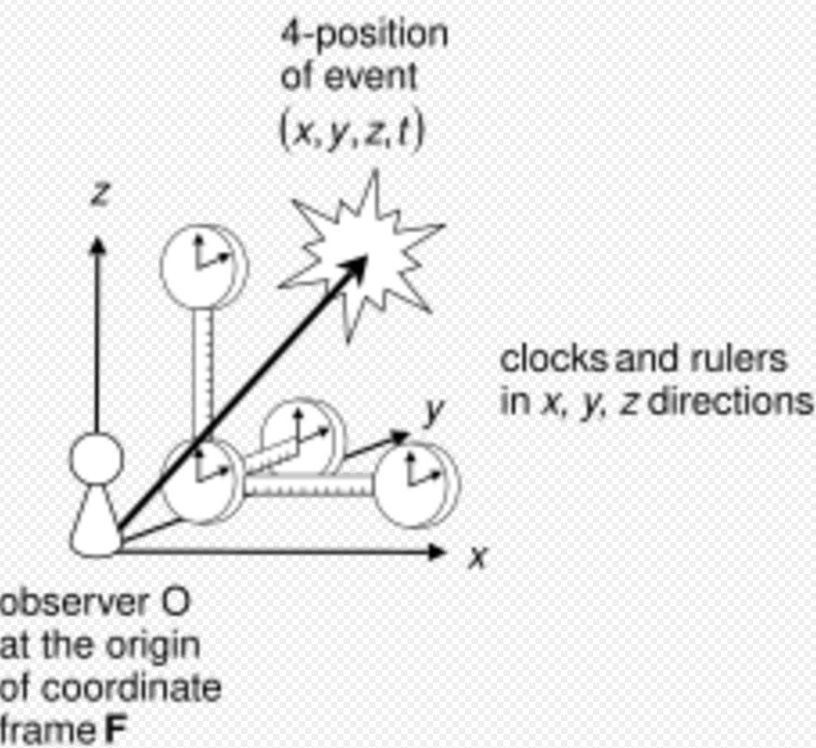


A reference frame is a coordinate system used to describe the position and motion of objects.
To analyze motion, we need:
- A coordinate system
- A clock to measure time
- An observer to make measurements
Motion is always described relative to a reference frame.
Example:
A passenger sitting in a moving train may appear stationary to another passenger but moving relative to a person standing on the ground.
Thus, motion depends on the frame of reference chosen.
Inertial Reference Frames
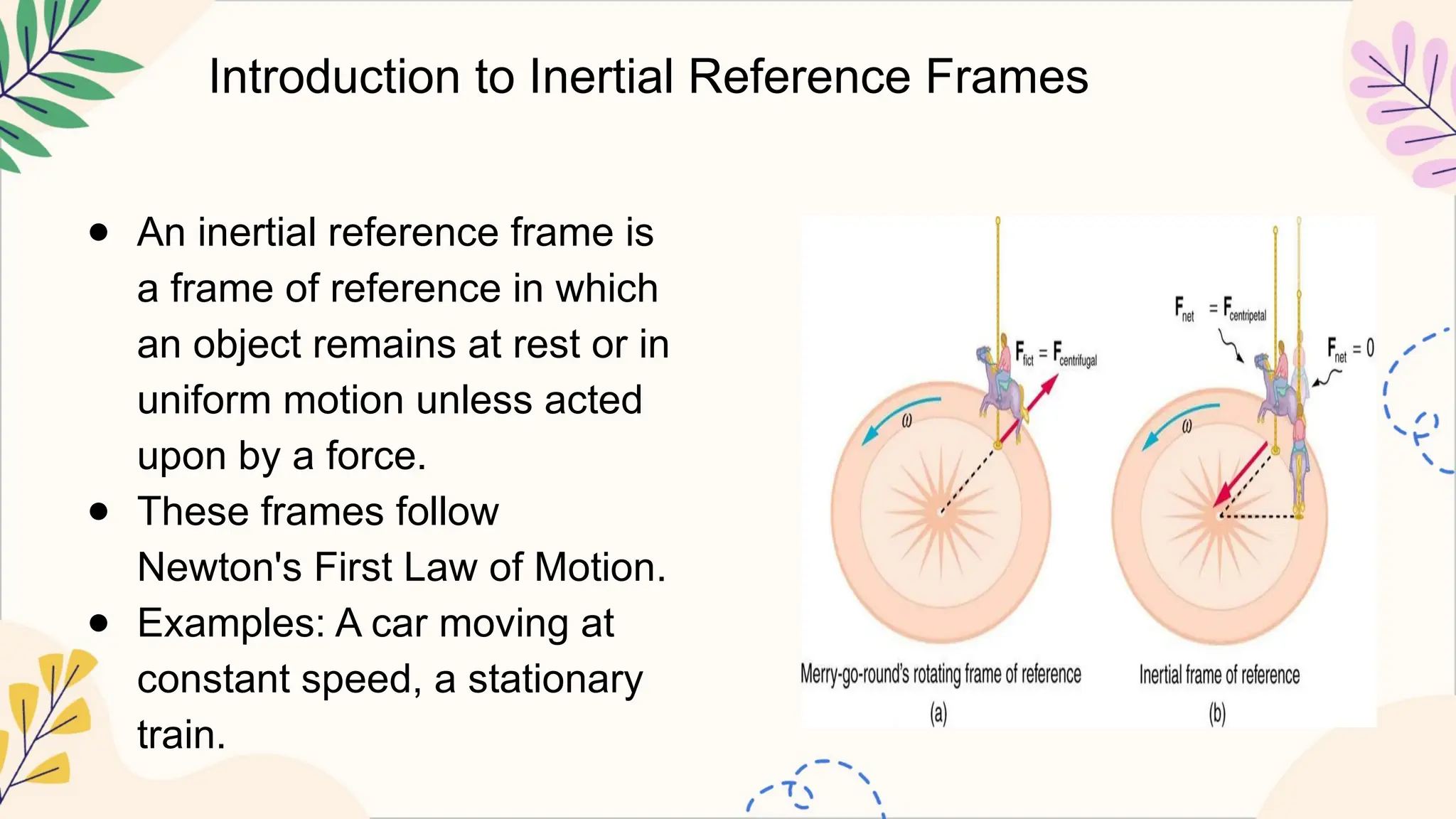


An inertial reference frame is a frame of reference that is either at rest or moving with constant velocity.
In such frames:
- Newton’s laws of motion are valid.
- Objects remain at rest or move in straight lines unless acted upon by forces.
Examples include:
- A stationary laboratory on Earth (approximate inertial frame for small experiments)
- A spacecraft moving at constant velocity in deep space
Inertial frames provide the simplest way to describe motion.
Non-Inertial Reference Frames



A non-inertial reference frame is a frame that is accelerating or rotating relative to an inertial frame.
In such frames:
- Newton’s laws appear to be violated.
- Extra forces must be introduced to explain observed motion.
These extra forces are called:
- Fictitious forces
- Pseudo-forces
- Inertial forces
Examples of non-inertial frames include:
- Accelerating vehicles
- Rotating systems
- Orbiting spacecraft
Observers inside these frames experience apparent forces even when no real forces act on objects.
Fictitious Forces

In non-inertial frames, additional forces must be introduced to apply Newton’s laws.
These are called fictitious forces because they arise from acceleration of the frame rather than physical interactions.
Mathematically:
[
F_{fictitious} = -m a_{frame}
]
Where:
- (m) = mass of object
- (a_{frame}) = acceleration of reference frame
Examples include:
- Centrifugal force
- Coriolis force
- Euler force
These forces help explain motion observed within accelerating frames.
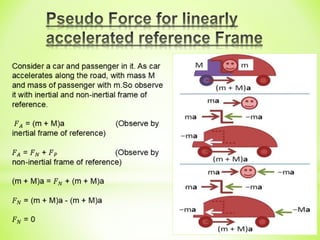
Accelerating Reference Frames

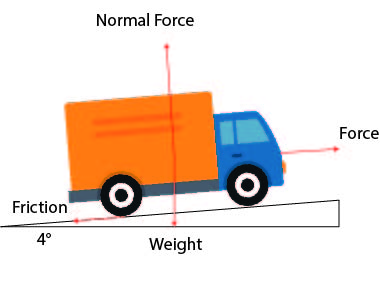
Consider a car accelerating forward.
To a passenger inside the car:
- Objects appear to move backward.
However, from an external inertial frame:
- The objects tend to remain at rest while the car accelerates forward.
To explain this in the car’s frame, a pseudo-force acting backward must be introduced.
This force is:
[
F = -ma
]
This allows Newton’s laws to be applied within the accelerating frame.
Rotating Reference Frames


A rotating reference frame is another type of non-inertial frame.
In rotating systems, several fictitious forces arise.
Examples include:
- Centrifugal force
- Coriolis force
- Euler force
These forces explain why objects appear to move in curved paths in rotating systems.
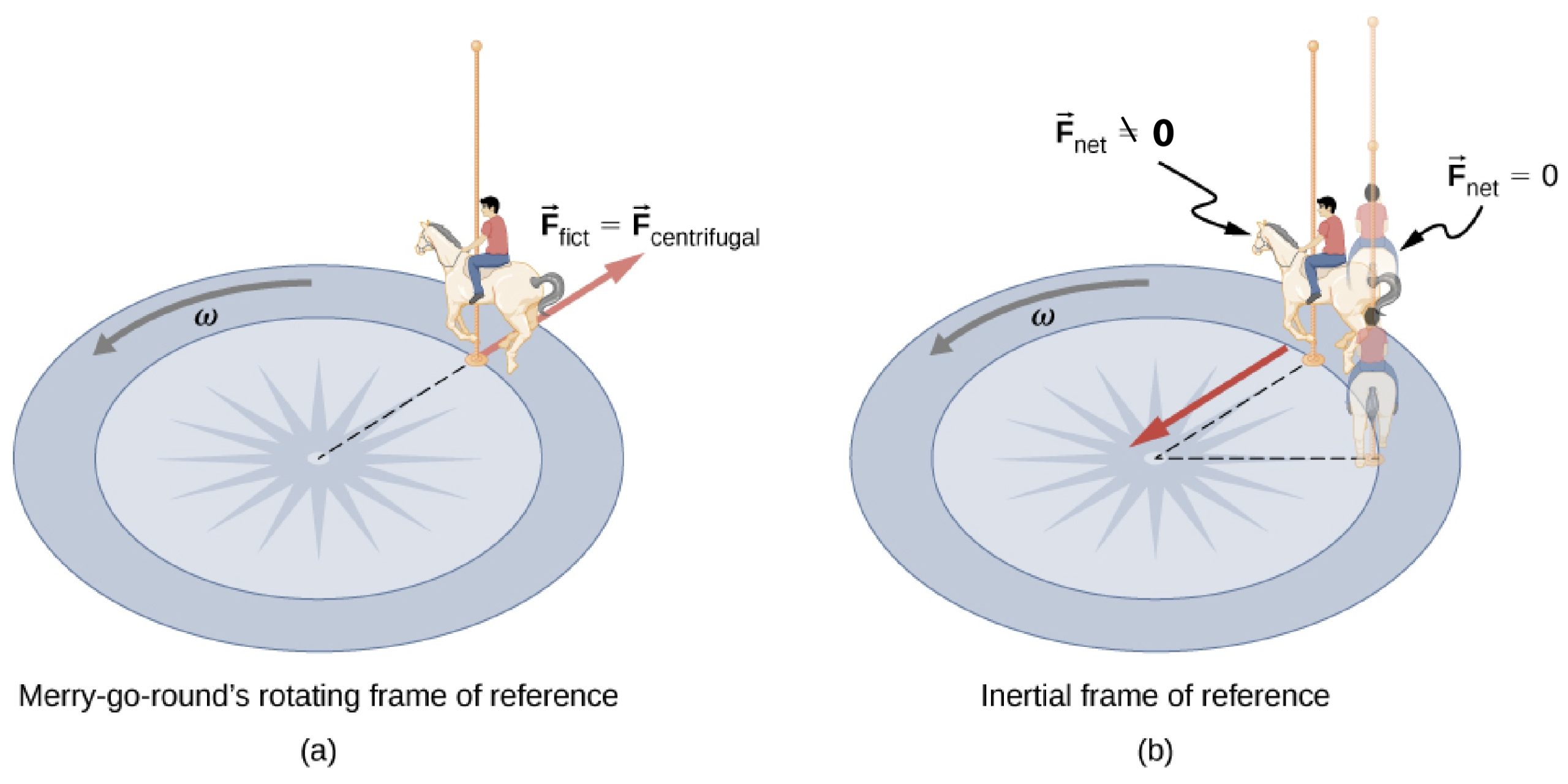
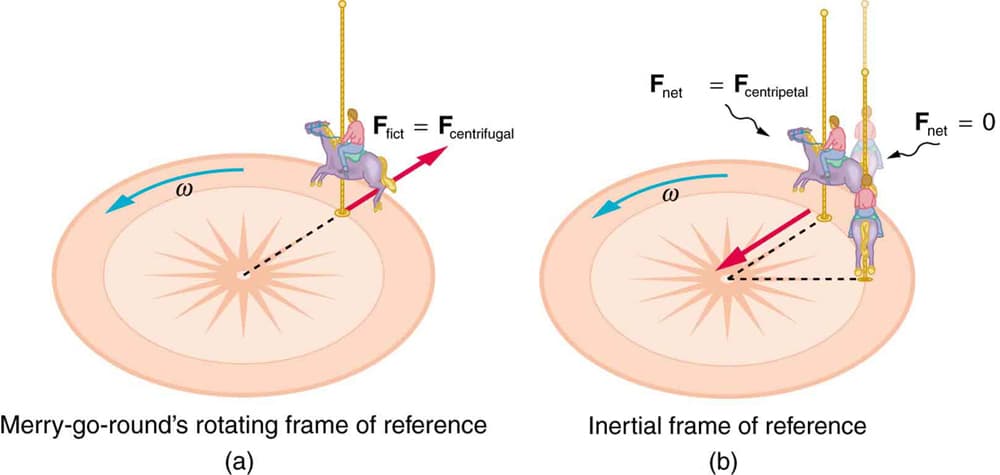
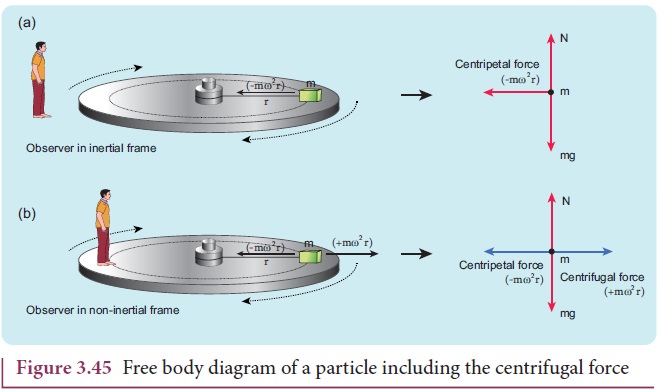
Centrifugal Force
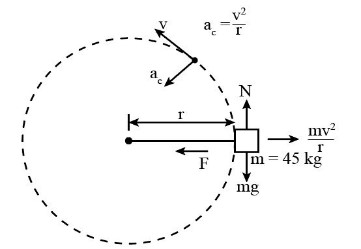



The centrifugal force is experienced in rotating frames.
It acts away from the center of rotation.
Formula:
[
F_c = m\omega^2 r
]
Where:
- (m) = mass
- ( \omega ) = angular velocity
- (r) = distance from axis
Examples:
- Feeling pushed outward on a rotating ride
- Water sticking to the sides of a spinning bucket
Coriolis Force


The Coriolis force occurs in rotating frames when objects move relative to the rotating surface.
Formula:
[
F_{Coriolis} = 2m(\vec{v} \times \vec{\omega})
]
Where:
- (v) = velocity of object
- ( \omega ) = angular velocity of frame
Examples:
- Deflection of winds on Earth
- Ocean currents
- Ball trajectories over long distances
This force plays a major role in meteorology.
Non-Inertial Frames on Earth




The Earth itself is a rotating reference frame.
Consequences include:
- Coriolis effect on weather patterns
- Centrifugal force affecting gravity
- Rotation effects in ocean currents
The Foucault pendulum experiment demonstrates Earth’s rotation.
Applications of Non-Inertial Frames

Non-inertial frames are important in many practical fields.
Meteorology
Weather systems depend on Coriolis forces.
Aerospace Engineering
Satellite motion must account for rotating Earth.
Navigation Systems
Gyroscopes use rotational dynamics.
Space Physics
Rotating frames simplify analysis of orbital motion.
Understanding non-inertial frames helps improve predictions in many physical systems.
Importance in Physics
Non-inertial reference frames provide a deeper understanding of motion in accelerating systems.
They help explain phenomena such as:
- Apparent forces in moving vehicles
- Rotational effects in planetary systems
- Atmospheric circulation patterns
These concepts are essential in advanced areas such as general relativity, where gravity itself can be interpreted as effects of non-inertial motion.
Conclusion
Non-inertial reference frames are frames that accelerate or rotate relative to inertial frames. In such frames, Newton’s laws appear to be violated unless additional fictitious forces are introduced. These forces arise due to the acceleration of the reference frame rather than physical interactions between objects.
Important fictitious forces include centrifugal force and Coriolis force, which play major roles in rotating systems such as Earth. Understanding non-inertial frames allows physicists and engineers to analyze motion in accelerating environments and is essential for studying many real-world systems.
From rotating planets and weather patterns to spacecraft navigation and modern physics theories, non-inertial reference frames are a key concept in understanding the dynamics of motion.