

Introduction
Rigid body motion is an important concept in classical mechanics that describes the movement of an object in which the distance between all pairs of points within the object remains constant during motion. In other words, the object does not deform or change shape while it moves.
Rigid bodies are idealized models used in physics and engineering to simplify the study of motion. Real objects may deform slightly under forces, but many physical systems can be approximated as rigid bodies.
Rigid body motion plays a major role in many areas such as:
- Mechanical engineering
- Robotics
- Aerospace engineering
- Structural mechanics
- Biomechanics
Examples of rigid body motion include:
- Rotation of a wheel
- Motion of a satellite
- Movement of machinery components
- Motion of rotating planets
Rigid body motion can involve translation, rotation, or a combination of both.
Understanding rigid body motion helps explain the behavior of complex mechanical systems and is essential in designing machines, vehicles, and structures.
Definition of a Rigid Body


A rigid body is defined as an object in which the distance between any two points remains constant regardless of external forces or motion.
Mathematically:
If two points (A) and (B) belong to a rigid body, then
[
|AB| = constant
]
during motion.
This means:
- No deformation occurs.
- The object maintains its shape and size.
Rigid body models simplify many mechanical analyses.
Types of Rigid Body Motion
Rigid body motion can be classified into three main types:
- Translational motion
- Rotational motion
- General motion (combination of translation and rotation)
Translational Motion



In translational motion, every point of the rigid body moves along parallel paths.
Characteristics:
- All points have the same velocity.
- All points have the same acceleration.
Types of translational motion include:
Rectilinear Translation
Motion occurs along a straight line.
Example:
A train moving along a straight track.
Curvilinear Translation
Motion occurs along a curved path.
Example:
A car moving along a curved road.
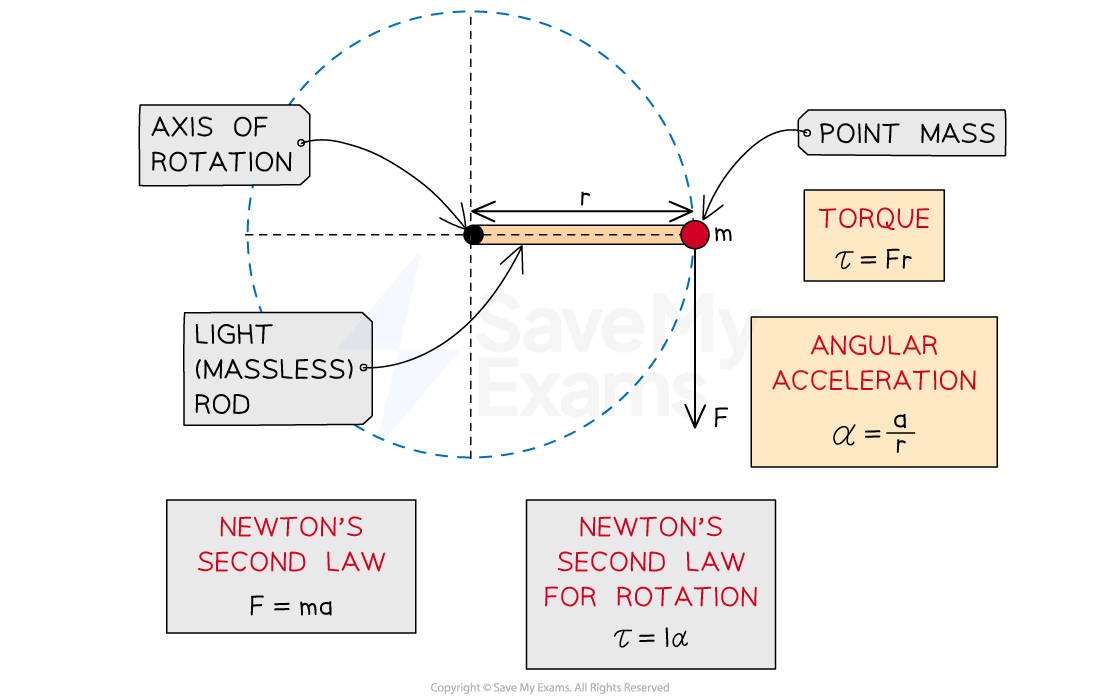
Rotational Motion
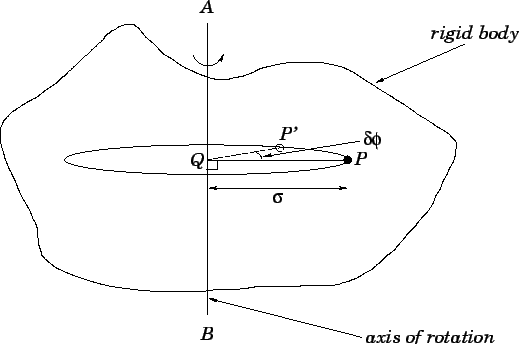



In rotational motion, the rigid body rotates about a fixed axis.
Characteristics:
- Every point moves in a circular path.
- Points farther from the axis move faster.
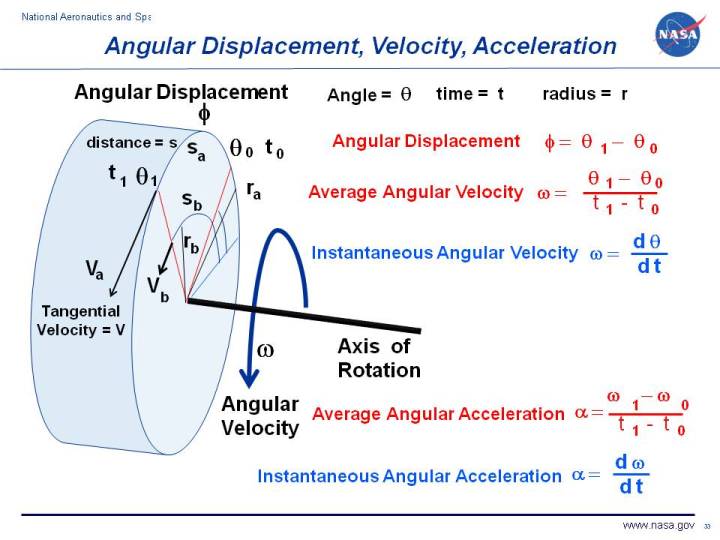
Important quantities include:
- Angular displacement
- Angular velocity
- Angular acceleration
Rotational motion is common in:
- Wheels
- Turbines
- Rotating machinery
General Motion


Most real motions involve a combination of translation and rotation.
Example:
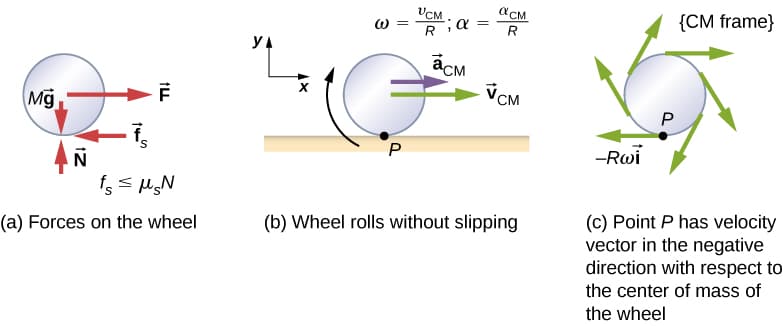
A rolling wheel.
In such motion:
- The center of mass translates.
- The body rotates about the center of mass.
This type of motion is called general rigid body motion.
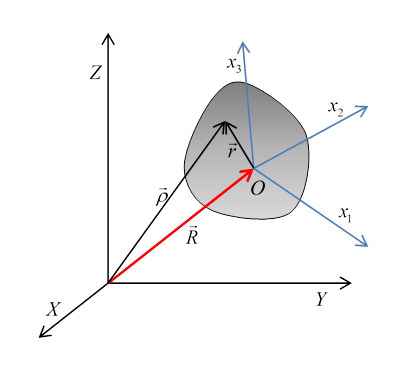
Center of Mass
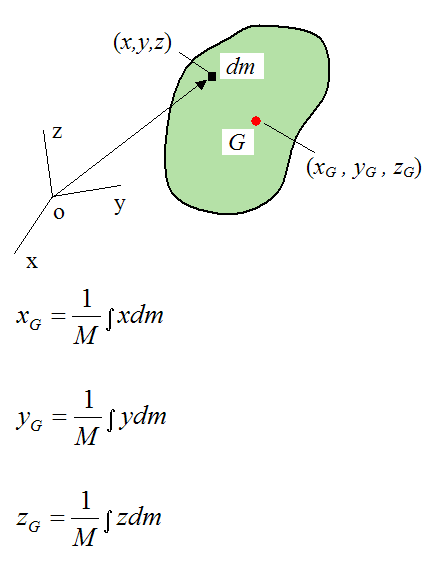


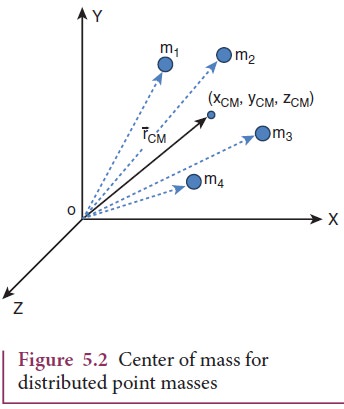
The center of mass is the point where the total mass of a body can be considered to be concentrated.
Mathematically:
[
\vec{R} = \frac{\sum m_i \vec{r_i}}{\sum m_i}
]
Where:
- (m_i) = mass of particle
- (r_i) = position vector
The motion of the center of mass represents the translational motion of the entire body.
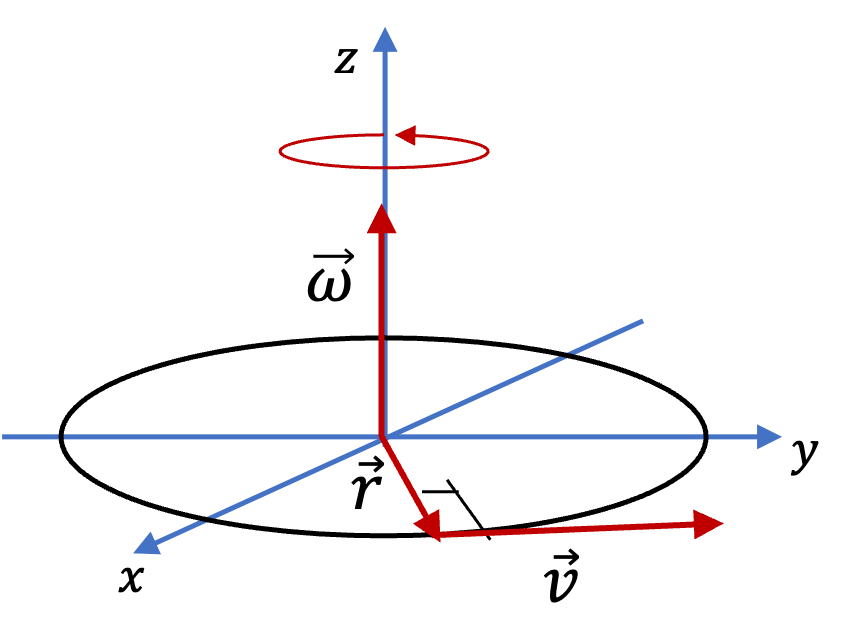
Velocity of Points in a Rigid Body

The velocity of any point in a rotating rigid body depends on its distance from the axis of rotation.
[
v = r\omega
]
Where:
- (v) = linear velocity
- (r) = distance from axis
- ( \omega ) = angular velocity
Points farther from the axis move faster.
Acceleration in Rigid Body Motion

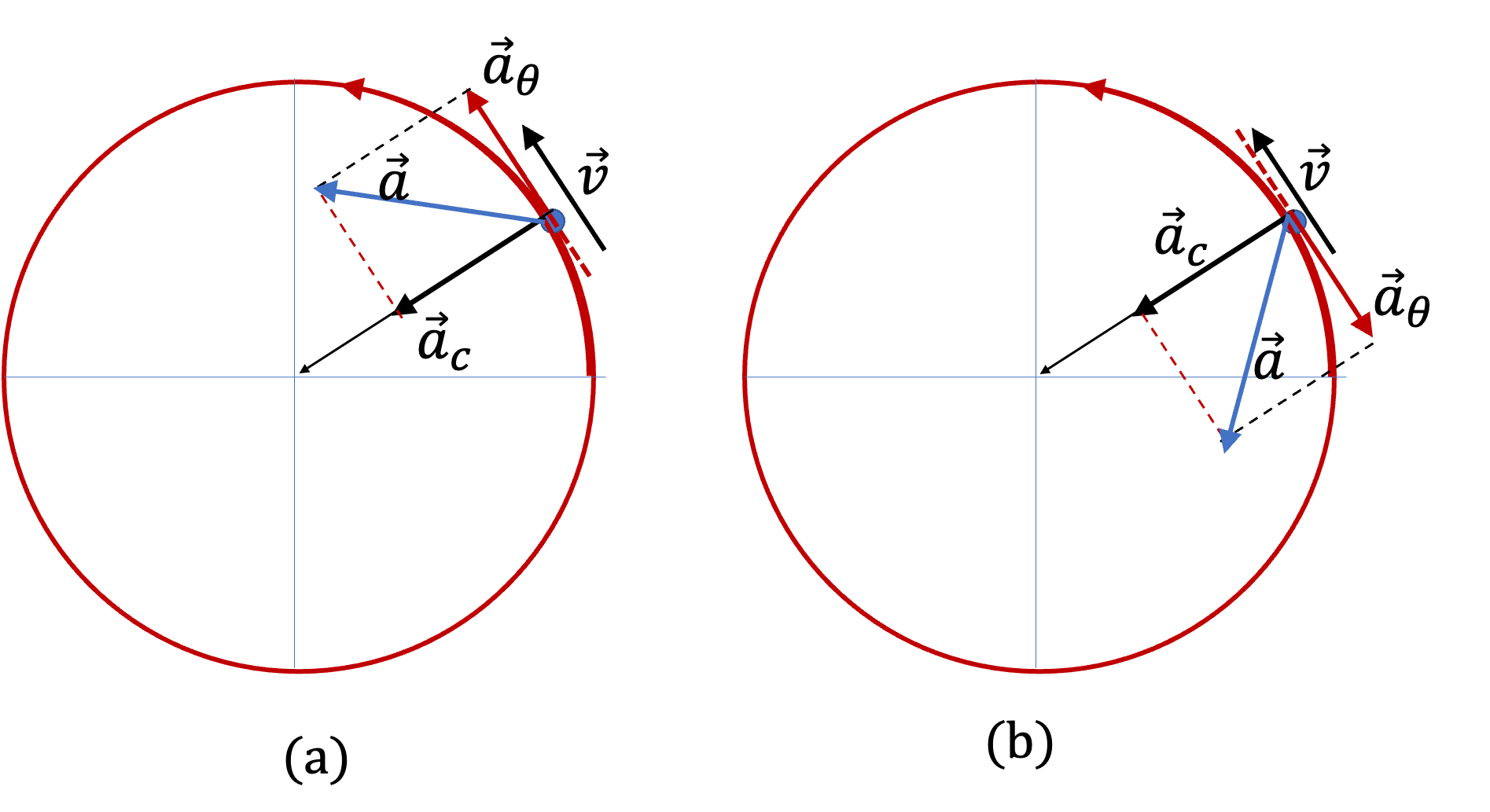

Acceleration of a point in a rotating rigid body has two components.
Tangential Acceleration
[
a_t = r\alpha
]
Where:
- ( \alpha ) = angular acceleration.
Centripetal Acceleration
[
a_c = r\omega^2
]
This acceleration points toward the center of rotation.
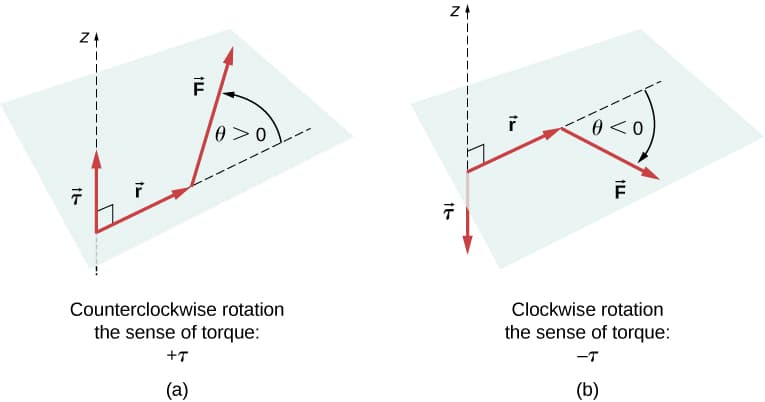
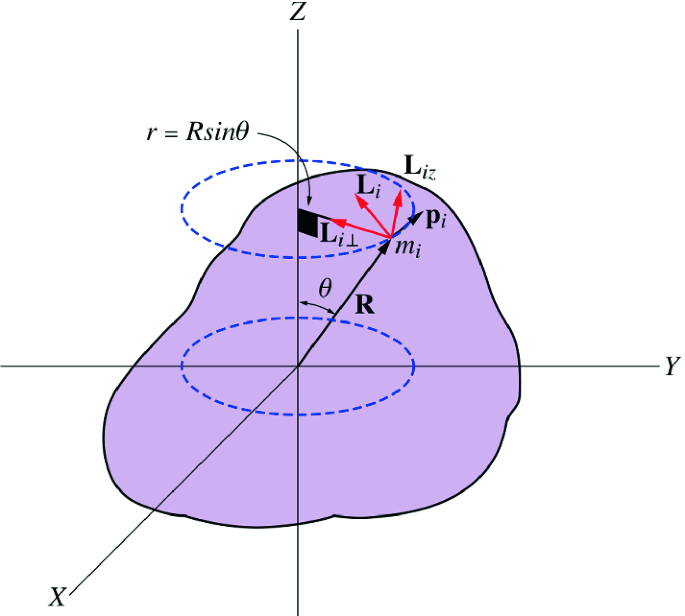
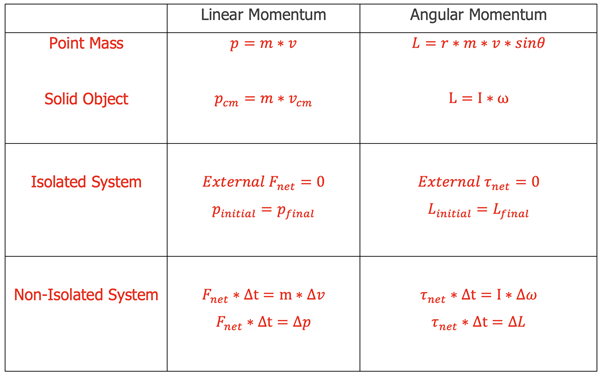
Angular Momentum of a Rigid Body



Angular momentum describes the rotational motion of a rigid body.
[
L = I\omega
]
Where:
- (L) = angular momentum
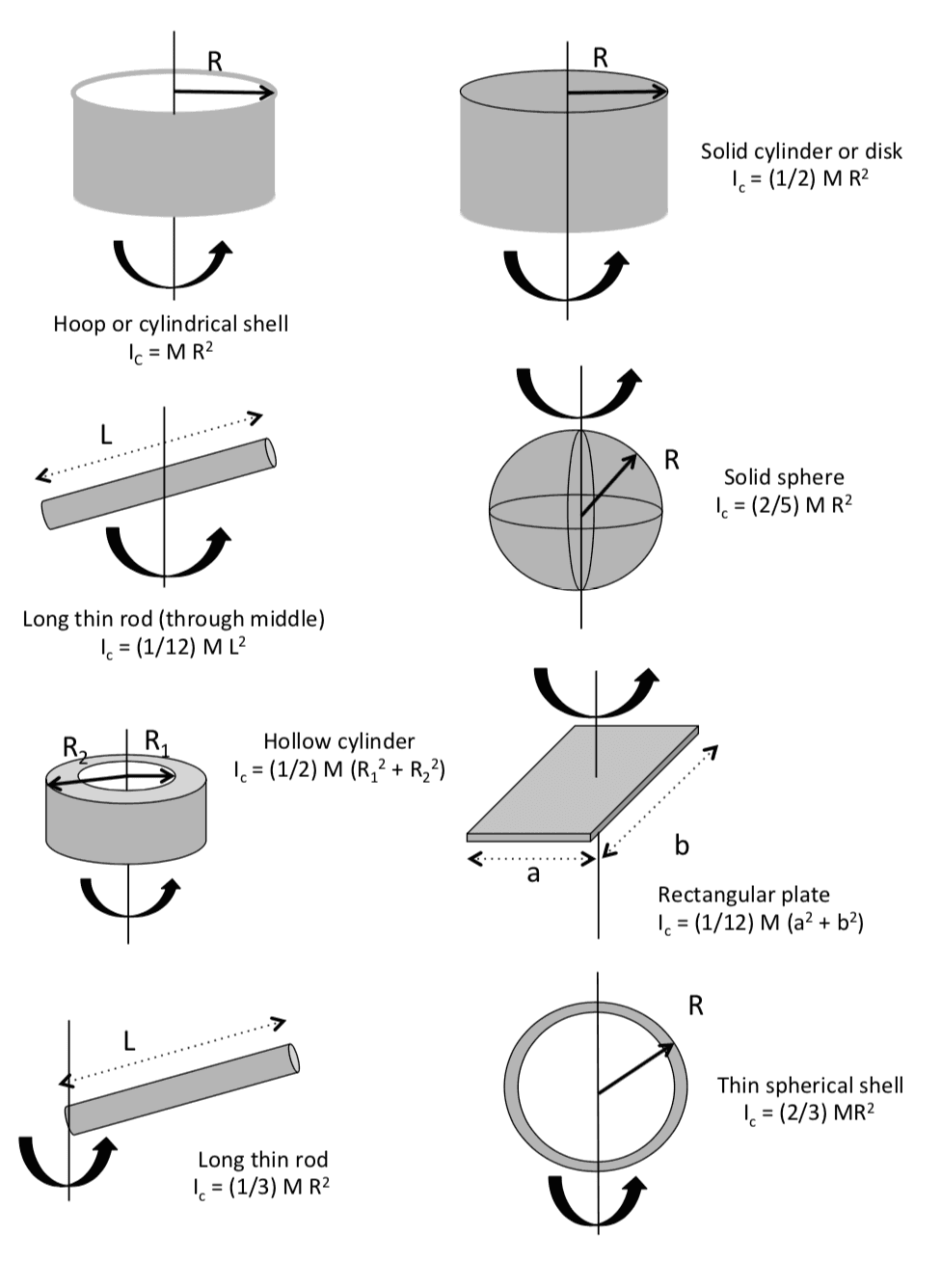
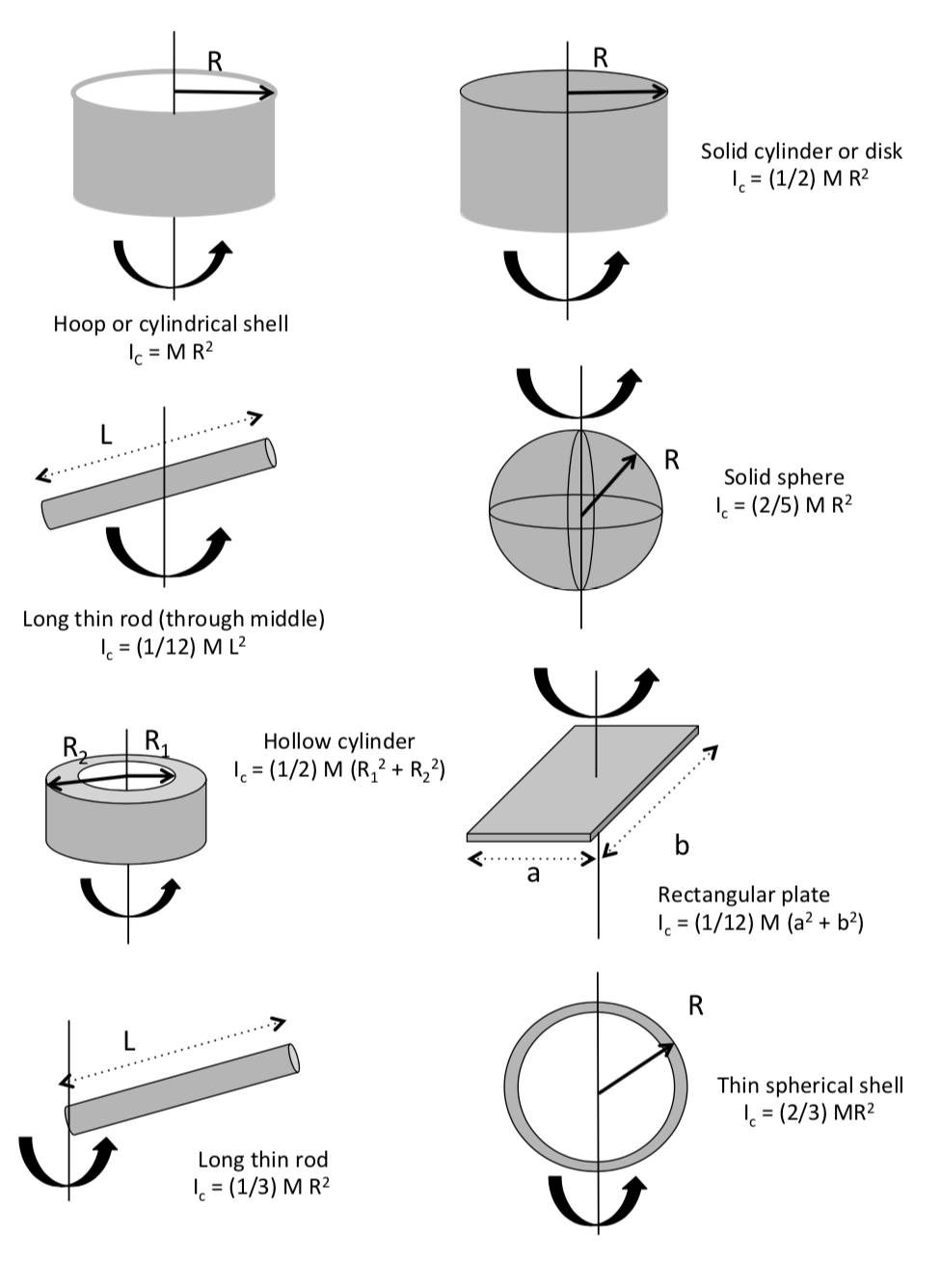
- (I) = moment of inertia
- ( \omega ) = angular velocity
Angular momentum is conserved when no external torque acts on the system.
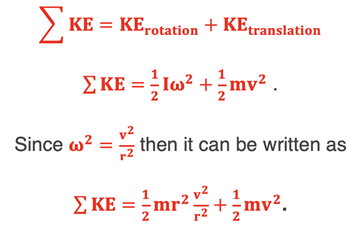
Energy of a Rigid Body


A rigid body can have two types of kinetic energy.
Translational Kinetic Energy
[
K_t = \frac{1}{2} M V^2
]
Where (V) is velocity of the center of mass.
Rotational Kinetic Energy
[
K_r = \frac{1}{2} I\omega^2
]
Total kinetic energy:
[
K = \frac{1}{2}MV^2 + \frac{1}{2}I\omega^2
]
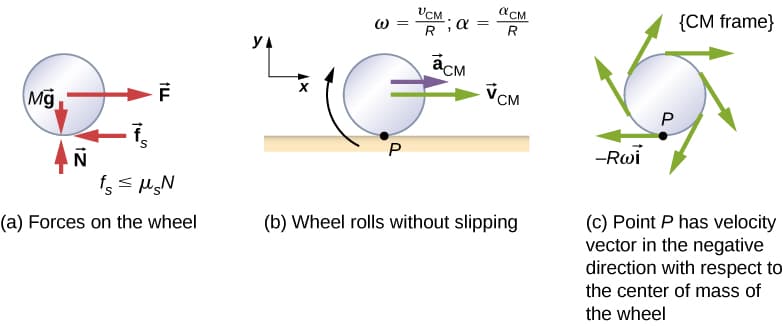
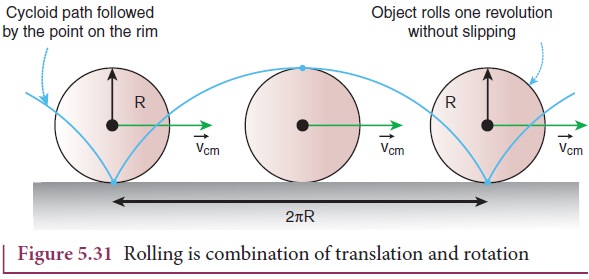
Rolling Motion

Rolling motion occurs when a rigid body rotates while translating.
For rolling without slipping:
[
v = r\omega
]
Examples include:
- Rolling wheels
- Rolling balls
- Rolling cylinders
Rolling motion combines translational and rotational energies.
Applications of Rigid Body Motion




Rigid body motion is important in many technologies.
Robotics
Robot arms are analyzed as rigid bodies.
Aerospace Engineering
Satellite orientation uses rigid body dynamics.
Mechanical Engineering
Machines and engines rely on rigid body motion.
Biomechanics
Human body movement can be approximated using rigid body models.
Importance in Physics
Rigid body motion provides the foundation for understanding many mechanical systems.
It connects several fundamental concepts:
- Translational dynamics
- Rotational dynamics
- Energy conservation
- Angular momentum
It is widely used in both theoretical and applied physics.
Conclusion
Rigid body motion describes the movement of objects that maintain constant shape and size during motion. Such motion can involve translation, rotation, or a combination of both. The analysis of rigid body motion includes concepts such as center of mass, angular velocity, angular acceleration, and moment of inertia.
Understanding rigid body dynamics allows scientists and engineers to analyze the motion of complex mechanical systems, from rotating machinery and vehicles to satellites and planetary motion.
Rigid body motion remains one of the fundamental topics in classical mechanics and continues to play a vital role in modern engineering and physics.