

1. Introduction to Vectors
Vectors are one of the most fundamental concepts in mathematics and physics. They are widely used to represent quantities that have both magnitude and direction. Unlike scalar quantities, which only describe magnitude, vectors capture both size and direction, making them essential in describing motion, forces, displacement, velocity, and many physical phenomena.
The concept of vectors is extensively used in several fields such as mathematics, physics, engineering, computer graphics, navigation, robotics, machine learning, and data science. In geometry and algebra, vectors help describe movement, transformation, and spatial relationships.
A vector can be visually represented as an arrow. The length of the arrow indicates the magnitude of the vector, while the direction of the arrow shows the direction in which the vector acts.
For example:
- Distance is a scalar quantity because it only tells how far something has moved.
- Displacement is a vector quantity because it tells both the distance and the direction of movement.
If a person walks 5 meters east, the magnitude is 5 meters and the direction is east, forming a vector.
Vectors are usually denoted using bold letters or with an arrow on top of the variable.
Examples:
v⃗ , a⃗ , F⃗
These symbols represent vectors with both magnitude and direction.
Vectors form the foundation of vector algebra and vector calculus, which are essential tools for studying motion, forces, and spatial relationships.
2. Scalar Quantities vs Vector Quantities
To understand vectors clearly, it is important to differentiate between scalar quantities and vector quantities.
Scalar Quantities
Scalar quantities have only magnitude and no direction.
Examples include:
- Mass
- Temperature
- Time
- Energy
- Speed
- Distance
- Volume
- Density
For instance, if the temperature is 30°C, only the magnitude matters.
Vector Quantities
Vector quantities possess both magnitude and direction.
Examples include:
- Displacement
- Velocity
- Acceleration
- Force
- Momentum
- Electric field
- Magnetic field
For example:
Velocity = 20 m/s north
Here,
Magnitude = 20 m/s
Direction = north
3. Representation of Vectors
Vectors can be represented in several ways.
Geometric Representation
Vectors are represented as directed line segments (arrows).
- The starting point is called the tail
- The ending point is called the head
The arrow shows the direction of the vector.
For example, if vector AB is drawn from point A to point B, it is written as:
AB⃗
The magnitude is represented as:
|AB⃗|
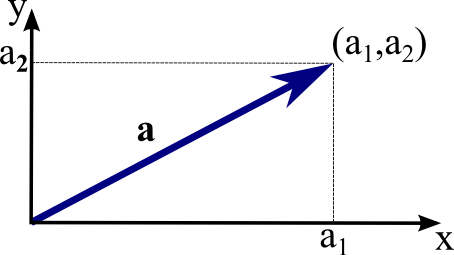
Coordinate Representation
In a Cartesian coordinate system, vectors are expressed using components.
For example:
v = (x, y)
This means the vector moves:
x units in horizontal direction
y units in vertical direction
Example:
v = (3,4)
This means:
3 units in x-direction
4 units in y-direction
The magnitude of this vector is:
|v| = √(3² + 4²)
|v| = √(9 + 16)
|v| = √25
|v| = 5
Column Vector Form
Vectors can also be written in column form:
v =
[ x ]
[ y ]
For example:
v =
[ 3 ]
[ 4 ]
Unit Vector Form
Vectors can be expressed using unit vectors.
In 3D space, three standard unit vectors are used:
i → x direction
j → y direction
k → z direction
A vector can be written as:
v = xi + yj + zk
Example:
v = 3i + 4j
This means:
3 units along x-axis
4 units along y-axis
4. Magnitude of a Vector
The magnitude of a vector represents its length.
For a vector:
v = (x, y)
The magnitude is:
|v| = √(x² + y²)
For a 3D vector:
v = (x, y, z)
Magnitude is:
|v| = √(x² + y² + z²)
Example:
v = (2, 3, 6)
|v| = √(2² + 3² + 6²)
|v| = √(4 + 9 + 36)
|v| = √49
|v| = 7
5. Types of Vectors
Zero Vector
A zero vector has magnitude zero and no direction.
It is represented as:
0⃗
Example:
(0,0)
Unit Vector
A vector with magnitude 1 is called a unit vector.
Example:
i = (1,0)
j = (0,1)
Unit vectors indicate direction.
Equal Vectors
Two vectors are equal if:
- Their magnitudes are equal
- Their directions are the same
Example:
A = (2,3)
B = (2,3)
Negative Vectors
Negative vectors have the same magnitude but opposite direction.
Example:
A = (3,4)
Negative vector:
−A = (−3,−4)
Parallel Vectors
Vectors pointing in the same or opposite direction.
Example:
A = (2,4)
B = (1,2)
These are parallel because B is a scaled version of A.
Collinear Vectors
Vectors lying on the same straight line are called collinear vectors.
Position Vector
A vector representing the position of a point from the origin.
Example:
Point P(3,4)
Position vector:
OP = (3,4)
6. Vector Addition
Vectors can be added together.
There are two geometric methods:
Triangle Law of Vector Addition
If vector B is placed at the head of vector A, the resultant vector is drawn from the tail of A to the head of B.
Mathematically:
R = A + B
Parallelogram Law
Two vectors are drawn from the same point.
A parallelogram is formed.
The diagonal represents the resultant vector.
Algebraic Addition
If:
A = (x₁,y₁)
B = (x₂,y₂)
Then:
A + B = (x₁ + x₂ , y₁ + y₂)
Example:
A = (2,3)
B = (4,1)
A + B = (6,4)
7. Vector Subtraction
Vector subtraction is defined as:
A − B = A + (−B)
Example:
A = (5,7)
B = (2,3)
A − B = (3,4)
8. Scalar Multiplication of Vectors
A vector can be multiplied by a scalar number.
If:
v = (x,y)
Then:
kv = (kx, ky)
Example:
v = (2,3)
3v = (6,9)
This changes the magnitude but not the direction (unless scalar is negative).
9. Dot Product (Scalar Product)
The dot product of two vectors produces a scalar value.
Formula:
A · B = |A||B| cosθ
Where:
θ = angle between vectors
In component form:
A · B = x₁x₂ + y₁y₂
Example:
A = (2,3)
B = (4,5)
A · B = (2×4) + (3×5)
= 8 + 15
= 23
Properties of Dot Product
- A · B = B · A
- A · (B + C) = A · B + A · C
- A · A = |A|²
Applications of Dot Product
Dot product is used to:
- Calculate angles between vectors
- Determine orthogonality
- Work calculations in physics
- Projection of vectors
10. Cross Product (Vector Product)
Cross product results in another vector.
Formula:
A × B = |A||B| sinθ n̂
Where:
n̂ = unit vector perpendicular to both vectors.
In determinant form:
A × B =
| i j k |
| a₁ a₂ a₃ |
| b₁ b₂ b₃ |
Properties
- A × B = −(B × A)
- A × A = 0
- Cross product is perpendicular to both vectors.
Applications
Used in:
- Torque calculation
- Angular momentum
- Magnetic force
- 3D graphics
11. Vector Projection
Projection of vector A onto vector B:
Proj_B(A) = (A · B / |B|²) B
This represents how much of vector A lies in the direction of B.
12. Direction Cosines
Direction cosines describe the angles a vector makes with coordinate axes.
If a vector makes angles α, β, γ with x, y, z axes:
cosα = x/|v|
cosβ = y/|v|
cosγ = z/|v|
Property:
cos²α + cos²β + cos²γ = 1
13. Vectors in Three Dimensions
In 3D space, vectors have three components.
Example:
v = (x,y,z)
This represents movement in:
x-direction
y-direction
z-direction
Example:
v = (2,4,6)
Magnitude:
|v| = √(2² + 4² + 6²)
14. Applications of Vectors
Vectors are used in many real-world areas.
Physics
Vectors describe motion, forces, and acceleration.
Examples:
- Newton’s laws
- Electromagnetism
- Fluid dynamics
Engineering
Vectors help analyze structures and forces.
Examples:
- Structural engineering
- Mechanical systems
- Robotics
Computer Graphics
Vectors are used to represent:
- 3D models
- Lighting
- Motion
Game engines rely heavily on vector calculations.
Navigation
Vectors are used to determine:
- Direction
- Distance
- Movement
Aircraft and ships use vector navigation.
Machine Learning
Vectors represent data points in multi-dimensional space.
Example:
Feature vectors in AI models.
15. Vectors in Geometry
Vectors simplify geometry calculations.
Applications include:
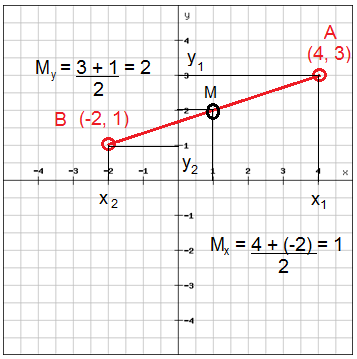
- Distance between points
- Midpoint calculation
- Area of triangles
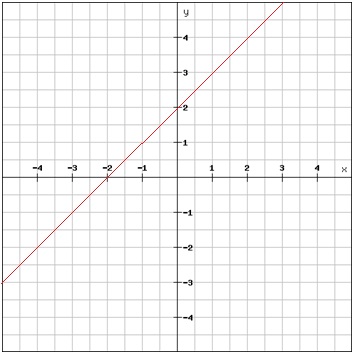
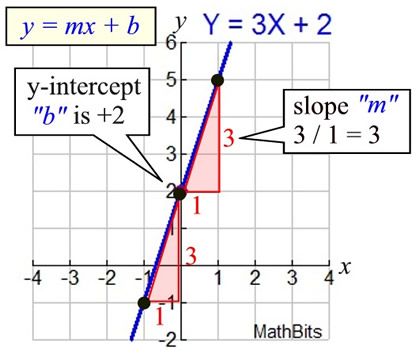
- Equation of lines
Example:
Distance formula using vectors.
16. Linear Combination of Vectors
A vector can be expressed as a combination of other vectors.
Example:
v = aA + bB
Where a and b are scalars.
17. Linear Independence
Vectors are linearly independent if none can be written as a combination of the others.
This concept is important in:
- Linear algebra
- Matrix theory
- Vector spaces
18. Vector Spaces
A vector space is a collection of vectors satisfying certain rules.
Properties include:
- Closure under addition
- Closure under scalar multiplication
- Existence of zero vector
- Existence of inverse vectors
Examples:
- R² space
- R³ space
- Polynomial vector spaces
19. Basis and Dimension
A basis is a set of vectors that can generate the entire vector space.
Example:
In 2D space:
i = (1,0)
j = (0,1)
Dimension is the number of basis vectors.
2D → dimension = 2
3D → dimension = 3
20. Importance of Vectors
Vectors are essential because they provide a powerful way to represent spatial relationships.
They allow:
- Efficient representation of motion
- Simplification of geometric problems
- Modeling of physical systems
- Data representation in machine learning
Without vectors, many modern technologies such as computer graphics, robotics, and artificial intelligence would not be possible.
Conclusion
Vectors are fundamental mathematical objects used to describe quantities with both magnitude and direction. They play a critical role in mathematics, physics, engineering, computer science, and many modern technological fields. From representing motion in physics to powering algorithms in artificial intelligence, vectors provide a structured way to model real-world phenomena.
Understanding vectors includes learning how to represent them, perform operations such as addition and multiplication, and apply them in various contexts. Concepts like dot product, cross product, vector spaces, and linear independence form the basis of advanced mathematical studies.
Because vectors describe direction and magnitude simultaneously, they serve as an essential bridge between geometry and algebra. Their applications extend far beyond theoretical mathematics and are deeply embedded in modern science and technology.