Introduction
In physics and mathematics, quantities used to describe the physical world are broadly classified into scalars and vectors. These two categories form the foundation of many physical concepts, especially in mechanics, electromagnetism, and engineering. Understanding the difference between scalars and vectors is essential for studying motion, forces, fields, and many other phenomena.
A scalar quantity is completely described by a single numerical value and a unit. It does not involve direction. Examples include temperature, mass, energy, and time.
A vector quantity, on the other hand, requires both magnitude and direction to be fully defined. Examples include displacement, velocity, acceleration, and force.
The distinction between scalars and vectors allows physicists to describe natural phenomena accurately. For example, when describing how fast a car moves, the speed alone is not always sufficient. The direction of motion may also be necessary, which requires the use of vectors.
Vectors are particularly important in physics because many physical processes involve directional effects. Motion, gravitational attraction, electric fields, and magnetic fields are all vector-based phenomena.
This topic is fundamental to understanding many areas of physics, including mechanics, electromagnetism, fluid dynamics, engineering mechanics, and computer graphics.
Scalar Quantities
Definition of Scalar
A scalar is a physical quantity that has magnitude only and no direction.
Mathematically, a scalar can be represented by a single real number.
For example:
Temperature = 30°C
Mass = 5 kg
Time = 10 s
These values describe the quantity completely without requiring direction.
Scalars follow the rules of ordinary algebra.
Characteristics of Scalars
Scalar quantities have several key properties.
- They have magnitude only.
- They do not require direction.
- They can be added or subtracted using normal arithmetic.
- They are represented by a single numerical value and unit.
- Their values remain unchanged under coordinate rotation.
Because scalars do not depend on direction, they are simpler to work with mathematically compared to vectors.
Examples of Scalar Quantities
Common scalar quantities in physics include:
Mass
Time
Temperature
Energy
Work
Speed
Density
Volume
Pressure
Electric charge
Power
Distance
Each of these quantities can be fully described by a number and unit.
For example:
Mass = 10 kg
Temperature = 25°C
Time = 5 seconds
No directional information is required.
Scalar Operations
Scalars follow the rules of ordinary algebra.
Addition
Two scalar quantities can be added directly.
Example:
5 kg + 3 kg = 8 kg
Subtraction
Example:
10 s − 4 s = 6 s
Multiplication
Example:
Force = mass × acceleration
Even though acceleration is a vector, the multiplication involves scalar magnitude.
Division
Example:
Speed = distance / time
Scalar operations are straightforward because direction does not need to be considered.
Vector Quantities
Definition of Vector
A vector is a physical quantity that has both magnitude and direction.
Vectors cannot be described by magnitude alone.
Example:
Velocity = 20 m/s east
The magnitude is 20 m/s, while the direction is east.
Without direction, the quantity would only represent speed, which is a scalar.
Representation of Vectors
Vectors are usually represented by arrows.
The arrow shows:
Magnitude → length of arrow
Direction → orientation of arrow
Mathematically, vectors are often written using bold letters or arrows.
Examples:
[
\vec{A}
]
or
[
\mathbf{A}
]
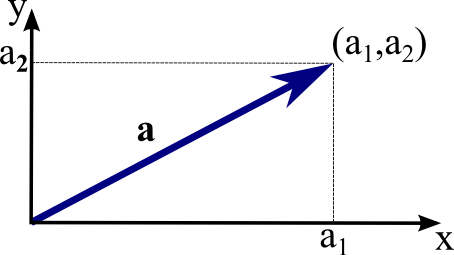
Components of a Vector
A vector in two dimensions can be expressed in terms of its components along the x and y axes.
[
\vec{A} = A_x \hat{i} + A_y \hat{j}
]
Where:
(A_x) = horizontal component
(A_y) = vertical component
The magnitude of the vector is:
[
|\vec{A}| = \sqrt{A_x^2 + A_y^2}
]
The direction is given by:
[
\theta = \tan^{-1}\left(\frac{A_y}{A_x}\right)
]
Vector components allow complex motions to be analyzed easily.
Examples of Vector Quantities
Common vector quantities include:
Displacement
Velocity
Acceleration
Force
Momentum
Torque
Electric field
Magnetic field
Gravitational field
Each of these requires both magnitude and direction.
For example:
Force = 10 N north
Velocity = 15 m/s east
Acceleration = 9.8 m/s² downward
Graphical Representation of Vectors



Vectors are often represented graphically using arrows.
Length of Arrow
Represents magnitude.
Direction of Arrow
Represents direction of the vector.
Graphical representation helps visualize vector addition and subtraction.
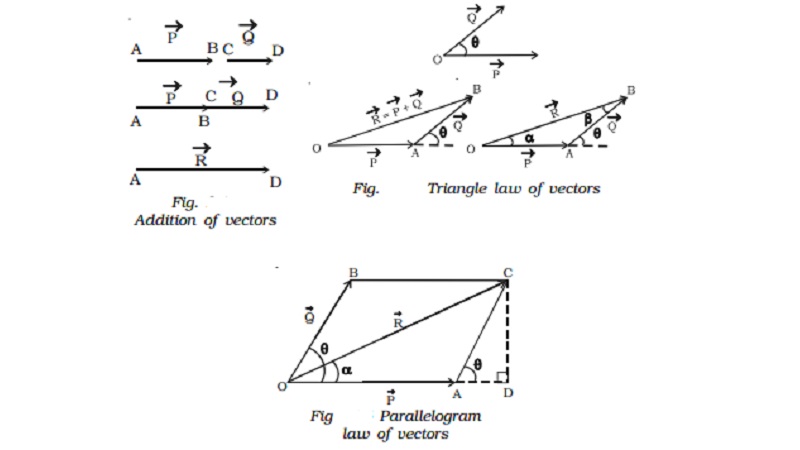
Vector Addition
Vectors cannot be added using simple arithmetic. Instead, special rules apply.
Two main graphical methods exist for vector addition.
Triangle Law of Vector Addition
In the triangle method:
- Place the tail of the second vector at the head of the first vector.
- Draw the resultant vector from the tail of the first vector to the head of the second vector.
This resultant represents the combined effect of both vectors.
Parallelogram Law of Vector Addition
In this method:
- Draw both vectors starting from the same point.
- Construct a parallelogram using the two vectors.
- The diagonal of the parallelogram represents the resultant vector.
Mathematically:
[
R = \sqrt{A^2 + B^2 + 2AB\cos\theta}
]
Where:
(A) and (B) are vector magnitudes
(\theta) is the angle between them.
Vector Subtraction
Vector subtraction can be performed by adding the negative vector.
[
\vec{A} – \vec{B} = \vec{A} + (-\vec{B})
]
The negative vector has the same magnitude but opposite direction.
Graphically, the reversed vector is added using the triangle method.
Unit Vectors
A unit vector is a vector with magnitude equal to one.
Unit vectors represent direction only.
In a Cartesian coordinate system, the standard unit vectors are:
[
\hat{i}
]
along the x-axis
[
\hat{j}
]
along the y-axis
[
\hat{k}
]
along the z-axis
These unit vectors help express vectors in component form.
Example:
[
\vec{A} = 3\hat{i} + 4\hat{j}
]
Magnitude:
[
|\vec{A}| = \sqrt{3^2 + 4^2} = 5
]
Types of Vectors
Vectors can be categorized into several types.
Zero Vector
A vector with zero magnitude.
Example:
[
\vec{0}
]
Unit Vector
Magnitude equals one.
Equal Vectors
Two vectors with same magnitude and direction.
Negative Vectors
Vectors with equal magnitude but opposite direction.
Parallel Vectors
Vectors pointing in the same or opposite direction.
Collinear Vectors
Vectors lying along the same line.
Scalar and Vector Products
Two important operations between vectors are scalar product and vector product.
Scalar Product (Dot Product)
The dot product between two vectors is defined as:
[
\vec{A} \cdot \vec{B} = AB\cos\theta
]
Result is a scalar.
Applications include:
Work done by a force
[
W = \vec{F} \cdot \vec{d}
]
Vector Product (Cross Product)
The cross product is defined as:
[
\vec{A} \times \vec{B} = AB\sin\theta \hat{n}
]
Result is a vector.
Direction is given by the right-hand rule.
Applications include:
Torque
Magnetic force
Angular momentum
Scalars vs Vectors
| Feature | Scalar | Vector |
|---|---|---|
| Definition | Magnitude only | Magnitude and direction |
| Representation | Single number | Arrow |
| Mathematical operations | Ordinary algebra | Vector algebra |
| Examples | Mass, time, temperature | Velocity, force, displacement |
Importance in Physics
Scalars and vectors are essential in many branches of physics.
Mechanics
Describing motion and forces.
Electromagnetism
Electric and magnetic fields are vectors.
Fluid Mechanics
Velocity fields in fluids are vector quantities.
Engineering
Structural forces and stresses involve vector analysis.
Computer Graphics
Vectors describe movement and orientation of objects.
Applications in Everyday Life
Vector concepts appear in many real-world situations.
Navigation
Direction and distance of travel.
Weather Forecasting
Wind speed and direction.
Sports
Ball trajectory and player motion.
Aviation
Aircraft velocity and wind vectors.
Robotics
Robot movement and orientation.
Summary
Scalars and vectors are two fundamental types of quantities used in physics to describe the physical world. Scalars represent quantities that have magnitude only, while vectors represent quantities that have both magnitude and direction.
Scalar quantities include mass, temperature, time, and energy, while vector quantities include displacement, velocity, acceleration, and force.
Vectors are represented graphically by arrows and mathematically using vector algebra. Vector addition, subtraction, and multiplication follow special rules that differ from ordinary arithmetic.
Understanding scalars and vectors is crucial for studying motion, forces, and fields in physics. These concepts serve as the building blocks for advanced topics such as mechanics, electromagnetism, and fluid dynamics.