
1. Introduction to Matrices
A matrix is a rectangular arrangement of numbers, symbols, or expressions organized in rows and columns. Matrices are one of the most important structures in mathematics and play a crucial role in algebra, engineering, physics, statistics, computer science, economics, and data science.
Matrices are particularly useful when dealing with large sets of numbers, solving systems of linear equations, performing transformations in geometry, and modeling real-world problems.
The plural of matrix is matrices.
Matrices were first introduced in the 19th century by mathematicians such as Arthur Cayley, who developed matrix algebra. Since then, matrices have become a fundamental component of linear algebra, which is widely used in scientific and technological applications.
For example, consider a simple table representing students’ marks:
| Math | Science | English |
|---|---|---|
| 85 | 78 | 90 |
| 88 | 82 | 91 |
This table can be represented as a matrix:
A =
[ 85 78 90 ]
[ 88 82 91 ]
Each number in a matrix is called an element or entry.
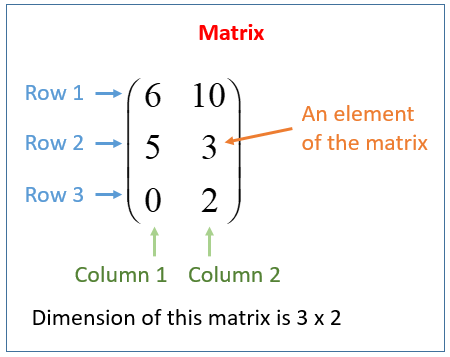
2. Structure of a Matrix
A matrix is defined by:
- Rows
- Columns
If a matrix has m rows and n columns, it is called an m × n matrix.
Example:
A =
[ 1 2 3 ]
[ 4 5 6 ]
This matrix has:
Rows = 2
Columns = 3
So it is called a 2 × 3 matrix.
General Form of a Matrix
A matrix is usually written as:
A = [aᵢⱼ]
Where:
- i represents row number
- j represents column number
Example:
A =
[ a11 a12 a13 ]
[ a21 a22 a23 ]
Here:
a21 means element in 2nd row and 1st column.
3. Representation of Matrices
Matrices are represented using capital letters.
Examples:
A, B, C, M, X
Example matrix:
A =
[ 2 5 ]
[ 3 7 ]
The elements are:
a11 = 2
a12 = 5
a21 = 3
a22 = 7
4. Order of a Matrix
The order of a matrix describes its size.
Order = rows × columns
Examples:
| Matrix | Order |
|---|---|
| [1 2] | 1 × 2 |
| [3 4; 5 6] | 2 × 2 |
| [1 2 3; 4 5 6; 7 8 9] | 3 × 3 |
5. Types of Matrices
Matrices can be classified into several types based on their structure.
Row Matrix
A matrix with only one row.
Example:
A = [ 2 4 6 8 ]
Order:
1 × 4
Column Matrix
A matrix with only one column.
Example:
A =
[3]
[5]
[7]
Order:
3 × 1
Rectangular Matrix
If rows ≠ columns.
Example:
2 × 3 matrix
A =
[1 2 3]
[4 5 6]
Square Matrix
A matrix with equal rows and columns.
Example:
A =
[1 2]
[3 4]
Order:
2 × 2
Square matrices are very important because many operations like determinants and inverses are defined for them.
Zero Matrix
A matrix whose elements are all zero.
Example:
A =
[0 0]
[0 0]
Diagonal Matrix
A square matrix where all elements except the diagonal are zero.
Example:
A =
[5 0 0]
[0 3 0]
[0 0 7]
Identity Matrix
A square matrix where diagonal elements are 1 and others are 0.
Example:
I =
[1 0 0]
[0 1 0]
[0 0 1]
Identity matrix behaves like number 1 in multiplication.
Scalar Matrix
A diagonal matrix with equal diagonal elements.
Example:
A =
[4 0 0]
[0 4 0]
[0 0 4]
Upper Triangular Matrix
Elements below the diagonal are zero.
Example:
A =
[2 4 6]
[0 5 7]
[0 0 9]
Lower Triangular Matrix
Elements above the diagonal are zero.
Example:
A =
[3 0 0]
[5 6 0]
[7 8 9]
6. Equality of Matrices
Two matrices are equal if:
- Their orders are equal
- Corresponding elements are equal
Example:
A =
[1 2]
[3 4]
B =
[1 2]
[3 4]
Therefore:
A = B
7. Addition of Matrices
Matrices can be added if they have the same order.
Example:
A =
[1 2]
[3 4]
B =
[5 6]
[7 8]
A + B =
[1+5 2+6]
[3+7 4+8]
Result:
[6 8]
[10 12]
Properties of Matrix Addition
- Commutative Property
A + B = B + A
- Associative Property
(A + B) + C = A + (B + C)
- Additive Identity
A + 0 = A
- Additive Inverse
A + (-A) = 0
8. Subtraction of Matrices
Matrix subtraction is defined as:
A − B = A + (−B)
Example:
A =
[8 6]
[4 2]
B =
[3 1]
[5 2]
A − B =
[5 5]
[-1 0]
9. Scalar Multiplication
Multiplying a matrix by a number.
Example:
A =
[2 4]
[6 8]
3A =
[6 12]
[18 24]
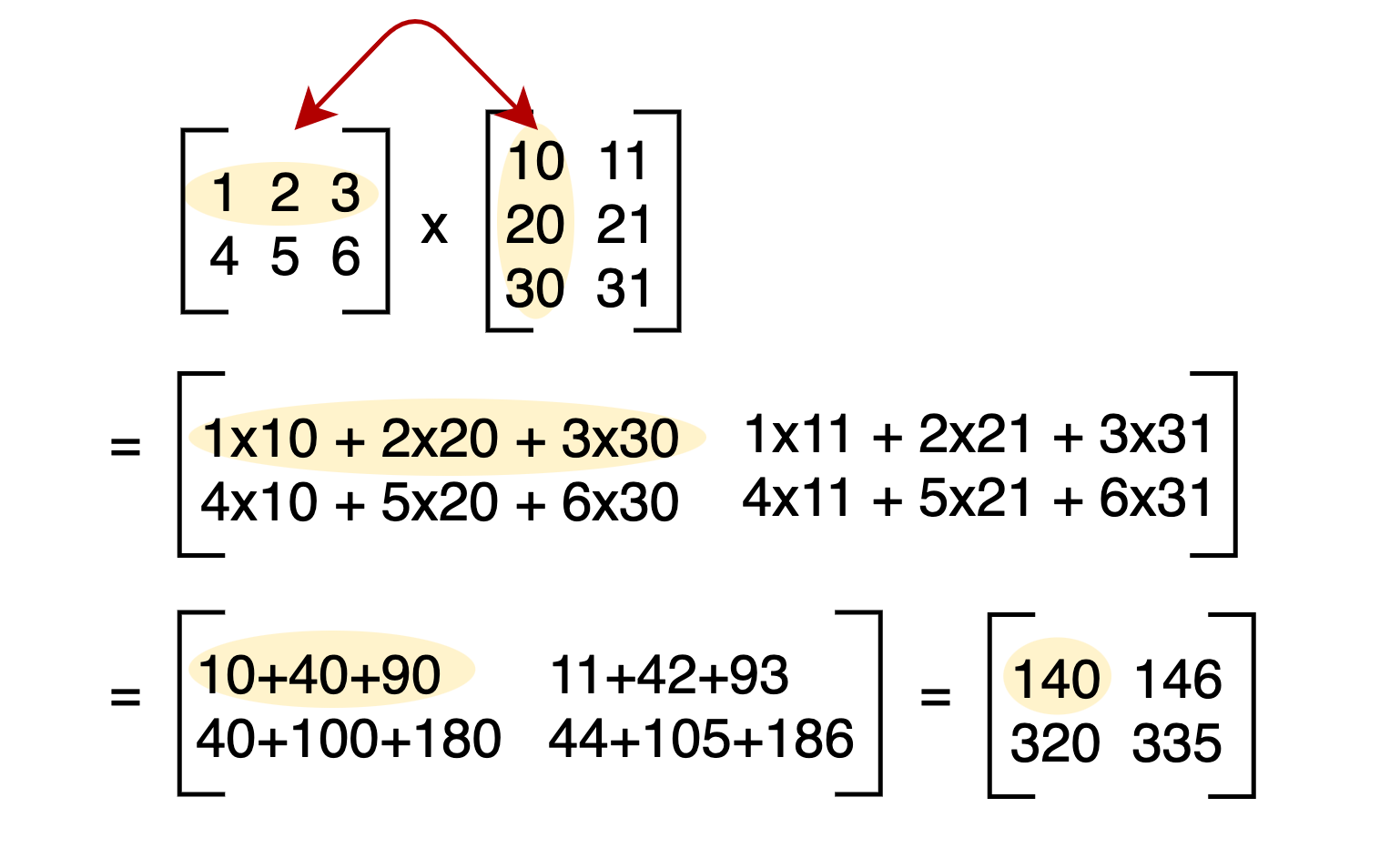
10. Matrix Multiplication
Matrix multiplication is different from ordinary multiplication.
Condition:
Columns of first matrix = rows of second matrix
If
A = m × n
B = n × p
Then:
AB = m × p
Example:
A =
[1 2]
[3 4]
B =
[5 6]
[7 8]
AB =
[1×5 + 2×7 1×6 + 2×8]
[3×5 + 4×7 3×6 + 4×8]
Result:
[19 22]
[43 50]
Properties of Matrix Multiplication
- Not commutative
AB ≠ BA
- Associative
(A B)C = A(B C)
- Distributive
A(B + C) = AB + AC
11. Transpose of a Matrix
The transpose of a matrix is obtained by interchanging rows and columns.
If A is matrix:
Aᵀ is transpose.
Example:
A =
[1 2 3]
[4 5 6]
Aᵀ =
[1 4]
[2 5]
[3 6]
12. Determinant of a Matrix
Determinants are defined only for square matrices.
For a 2×2 matrix
A =
[ a b ]
[ c d ]
Determinant:
|A| = ad − bc
Example:
| 2 3 |
| 4 5 |
= (2×5) − (3×4)
= 10 − 12
= −2
13. Inverse of a Matrix
A matrix inverse is similar to reciprocal.
If:
A⁻¹ exists then
A × A⁻¹ = I
Where I is identity matrix.
For 2×2 matrix:
A =
[ a b ]
[ c d ]
Inverse:
1/(ad − bc)
[ d −b ]
[ −c a ]
14. Rank of a Matrix
The rank of a matrix is the maximum number of independent rows or columns.
Rank tells:
- how many independent equations exist
- whether system has solution
15. Elementary Operations on Matrices
Three basic operations:
- Row swapping
- Row multiplication
- Row addition
Used in solving equations.
16. Systems of Linear Equations Using Matrices
Example system:
2x + y = 5
x + 3y = 7
Matrix form:
AX = B
A = coefficient matrix
X = variable matrix
B = constant matrix
Using inverse:
X = A⁻¹B
17. Applications of Matrices
Matrices are used in many fields.
Computer Graphics
Matrices perform transformations:
- Rotation
- Scaling
- Translation
Used in video games and animation.
Physics
Matrices describe:
- Quantum mechanics
- Electromagnetism
- Mechanics
Engineering
Used in:
- Structural analysis
- Electrical circuits
- Robotics
Economics
Matrices help analyze:
- Input-output models
- Economic forecasting
Statistics
Matrices represent datasets and perform calculations like:
- covariance
- regression
- machine learning algorithms
Cryptography
Matrices are used in encryption methods like the Hill cipher.
Artificial Intelligence
Matrices represent:
- neural networks
- machine learning data
- deep learning models
18. Matrices in Computer Science
Matrices play a major role in:
- Image processing
- Data compression
- Graph theory
- Machine learning
Example:
Images are stored as pixel matrices.
19. Eigenvalues and Eigenvectors
For a matrix A:
Av = λv
Where:
λ = eigenvalue
v = eigenvector
These concepts are used in:
- vibration analysis
- facial recognition
- Google PageRank
20. Importance of Matrices
Matrices simplify complex mathematical problems.
They help in:
- solving simultaneous equations
- modeling systems
- handling large datasets
- performing transformations
Matrices are essential tools in modern science and technology.
Conclusion
Matrices are powerful mathematical tools that organize numbers into structured arrays. They play a central role in linear algebra and are widely used in mathematics, engineering, physics, computer science, economics, and artificial intelligence. By representing complex data and relationships in a compact form, matrices make it easier to perform calculations, solve equations, and analyze systems.
Matrix operations such as addition, multiplication, transpose, determinants, and inverses allow mathematicians and scientists to model real-world problems effectively. Applications of matrices extend to computer graphics, machine learning, quantum physics, robotics, and cryptography.
Understanding matrices provides a foundation for advanced mathematical concepts and modern technological developments.